Note
Go to the end to download the full example code
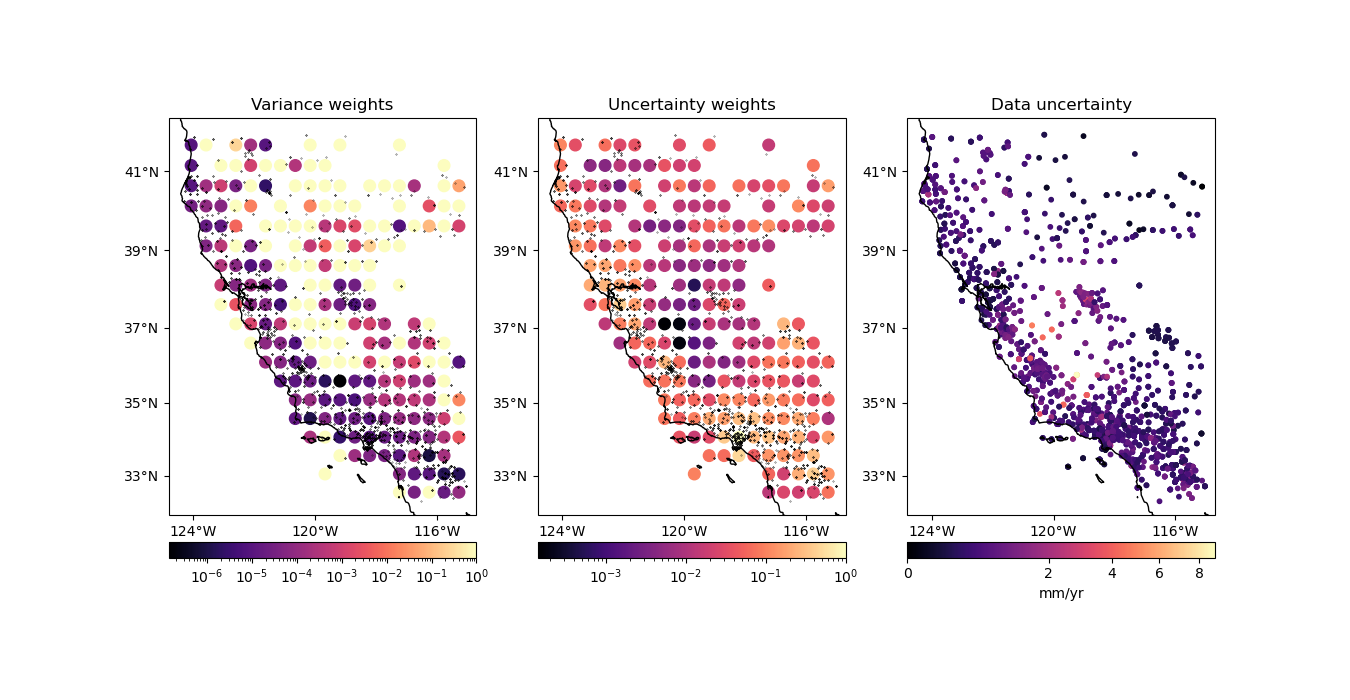
Using weights in blocked means#
verde.BlockReduce is not able to output weights because we need to
make assumptions about the reduction operation to know how to propagate
uncertainties or calculated weighted variances. That’s why verde provides
specialized reductions like verde.BlockMean, which can calculate
weights from input data in three ways:
Using the variance of the data. This is the only possible option when no weights are provided.
Using the uncertainty of the weighted mean propagated from the uncertainties in the data. In this case, we assume that the weights are
1/uncertainty**2.Using the weighted variance of the data.
Using the propagated uncertainties may be more adequate if your data is smooth in each block (low variance) but have very different uncertainties. The propagation preserves a low weight for data that have large uncertainties but don’t vary much inside the block.
The weighted variance should be used when the data vary a lot in each block
(high variance) but have very similar uncertainties. The variance will be large
when there is a lot of variability in the data that isn’t due to the
uncertainties. This is also the best choice if your data weights aren’t
1/uncertainty**2.
/usr/share/miniconda/envs/test/lib/python3.12/site-packages/verde/blockreduce.py:503: FutureWarning: DataFrameGroupBy.apply operated on the grouping columns. This behavior is deprecated, and in a future version of pandas the grouping columns will be excluded from the operation. Either pass `include_groups=False` to exclude the groupings or explicitly select the grouping columns after groupby to silence this warning.
blocked = table.groupby("block").apply(weighted_average_variance)
import cartopy.crs as ccrs
import matplotlib.pyplot as plt
from matplotlib.colors import LogNorm, PowerNorm
import verde as vd
# We'll test this on the California vertical GPS velocity data because it comes
# with the uncertainties
data = vd.datasets.fetch_california_gps()
coordinates = (data.longitude, data.latitude)
# We'll calculate the mean on large blocks to show the effect of the different
# weighting schemes
spacing = 30 / 60
# It's important that the weights are given as 1/sigma**2 for the uncertainty
# propagation. In this case, you should not use verde.variance_to_weights
# because it would normalize the weights.
weights = 1 / data.std_up**2
reducer = vd.BlockMean(spacing, center_coordinates=True)
# First produce the weighted variance weights
variance_weights = reducer.filter(coordinates, data.velocity_up, weights)[-1]
# And now produce the uncertainty propagation weights
reducer.set_params(uncertainty=True)
block_coords, velocity, uncertainty_weights = reducer.filter(
coordinates, data.velocity_up, weights
)
# Now we can plot the different weights side by side on Mercator maps
fig, axes = plt.subplots(
1, 3, figsize=(13.5, 7), subplot_kw=dict(projection=ccrs.Mercator())
)
crs = ccrs.PlateCarree()
titles = ["Variance weights", "Uncertainty weights"]
weight_estimates = [variance_weights, uncertainty_weights]
for ax, title, w in zip(axes[:2], titles, weight_estimates):
ax.set_title(title)
# Plot the original data locations
ax.plot(*coordinates, ".k", transform=crs, markersize=0.5)
# Plot the weights using a logarithmic color scale to highlight the
# differences
pc = ax.scatter(
*block_coords, c=w, s=70, cmap="magma", transform=crs, norm=LogNorm()
)
plt.colorbar(pc, ax=ax, orientation="horizontal", pad=0.05)
vd.datasets.setup_california_gps_map(ax)
# Plot the original data uncertainties
ax = axes[2]
ax.set_title("Data uncertainty")
# Use a power law for the color scale because there is a lot of variability
# Convert m/year to mm/year to have smaller values on the color bar
pc = ax.scatter(
*coordinates,
c=data.std_up * 1000,
s=10,
transform=crs,
alpha=1,
cmap="magma",
norm=PowerNorm(gamma=1 / 2)
)
plt.colorbar(pc, ax=ax, orientation="horizontal", pad=0.05).set_label("mm/yr")
vd.datasets.setup_california_gps_map(ax)
plt.show()
Total running time of the script: (0 minutes 0.619 seconds)